[THIS PROJECT IS STILL IN PROGRESS]
Giving a stepper motor torque control!
Field Oriented Controls of a Stepper Motor Driver
Project Details / Background
During the summer of 2022 I had the pleasure of working at the Grenoble Electrical Engineering Laboratory in Grenoble, France, with many brilliant researchers.
While at the lab I spent most of my time working on grid forming inverter control system designs for "microgrid" appilcations (small power grids, typically run on renewable
energy sources). I learned a lot working at the lab – one concept that particularly interested me was Park and Clarke Transforms and their ability to transform
3-phase AC signals into something that more closely resembles a DC system.
Thus, this intial interest has led me here, designing a FOC stepper motor driver from scratch. The PCB I designed uses a dual H-bridge setup to control the coils of the stepper It also uses a magnetic encoder for feedback and a daisy-chained power and CAN.
This design is still under development, but my up-to-date designs can be found on my GitHub.
Thus, this intial interest has led me here, designing a FOC stepper motor driver from scratch. The PCB I designed uses a dual H-bridge setup to control the coils of the stepper It also uses a magnetic encoder for feedback and a daisy-chained power and CAN.
This design is still under development, but my up-to-date designs can be found on my GitHub.
Image Gallery
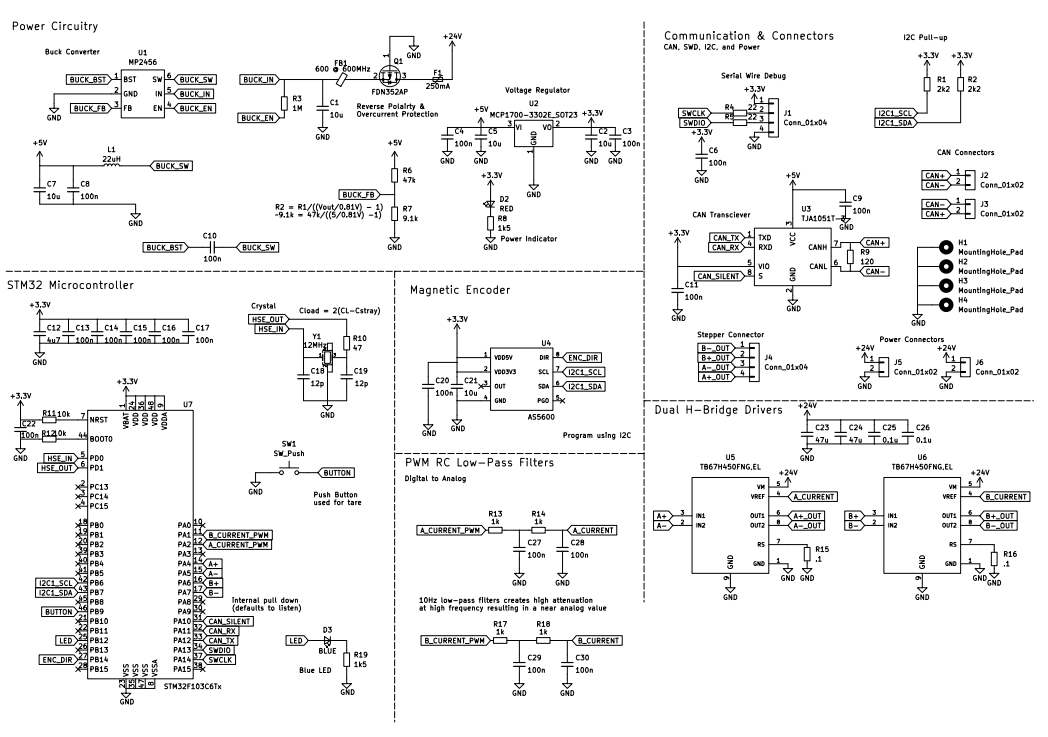 PCB Schematic
PCB Schematic
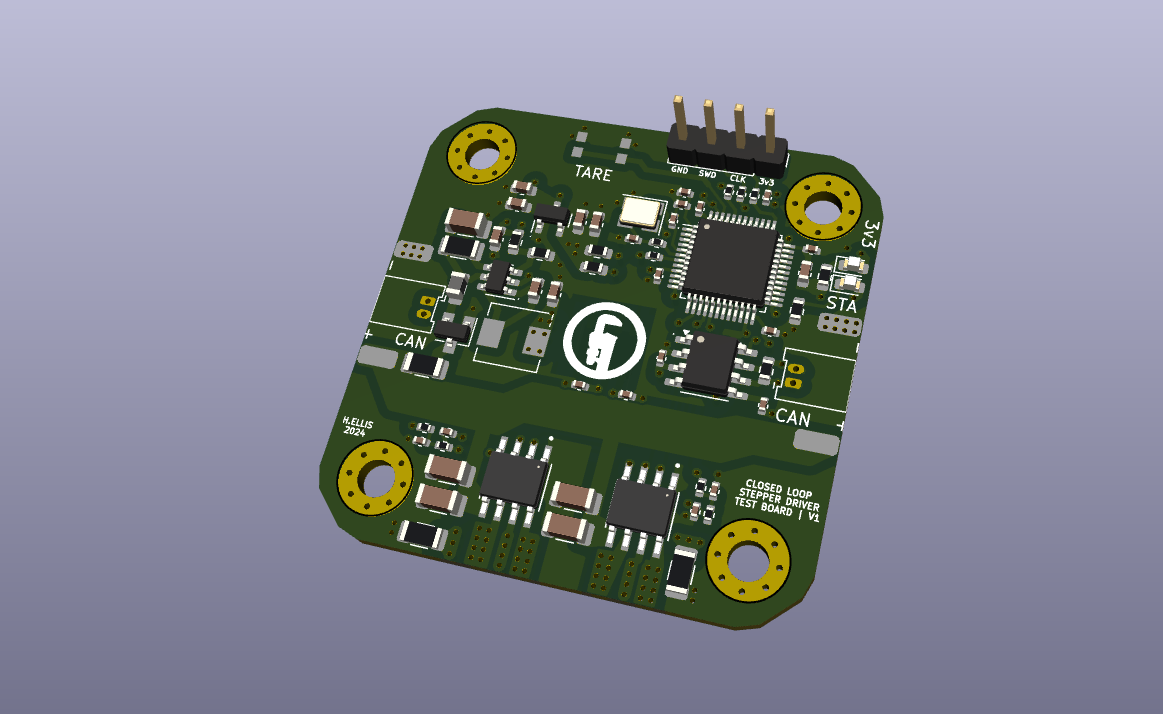 Render from KiCAD.
Render from KiCAD.
 PCB layout in KiCAD.
PCB layout in KiCAD.